| QEC home |
|
To next chapter --> |
Quantum Error Correction, |
 |
This page contains an informal introduction to quantum error correction, based around a series of pictures and diagrams.
1. Controlling a system using feedback
Quantum error correction (QEC) is concerned with correcting unwanted errors in the behaviour of quantum machinery (such as atoms, spin, photons, molecules, etc.). We have in mind a quantum device which is designed to exploit in complete detail the behaviour of its basic elements such as single atoms. The most well-studied example of such a machine is the quantum computer.
The basic elements of a quantum computer are fragile, simply because they are small. They are fragile not in the sense that they might break completely, but in the sense that only a small influence (such as a weak magnetic field, or a dim light beam) is required to cause them to move, for example by rotating, or to change state in some other way, such as jumping from one energy level to another. However, a quantum computer requires very accurate behaviour from its basic constituents. For example, we might want them to stay so still that undesired rotations are at the level of a part per billion over several hours.
|
That kind of stability is very hard to achieve. Actually, it can be achieved,
just, in atomic clocks. An atomic clock is based on either a single or a cloud
of trapped atoms, held in high vacuum and manipulated by pulses of microwaves
or laser light. For most of the time, the atoms are left completely in the dark,
and their behaviour, when left alone, reaches the kind of stability which is
required for quantum computing. This suggests they might possibly serve as
a useful quantum memory (at least for a few hours), though this would
require some further machinery to write and read general quantum states.
The stability offered by atomic clocks is passive stability. It is the type that is achieved by carefully engineering the system so that it is not subject to uncontrolled influences and does not dissipate energy. The classic example of passive stability in the everyday world is the gyroscope. |

 It is not feasible to construct a working quantum computer of useful size
based on passive stability alone. There is another type of stability, however,
called active stability. This is widely used in human-made machines
and in living organisms. In fact active stabilisation (also called servo-control)
is so widespread that almost all machines which have to operate without constant
human supervision rely on it. The most well-known early example is the governor or
steam governor introduced by James Watt to stabilise steam engines. (See figure)
The output of the steam engine is geared to a vertical shaft (a), attached to which
are two rods (c) with heavy balls (B) at the end. The rods can pivot about their
attaching point (b). When the shaft rotates, the balls
swing outwards, and cause a collar (e,f) to move upwards. This collar is attached
by a series of pivoting rods (g,i) to the steam valve, controlling
entry of steam to the engine. These pivots are oriented such that when the collar rises the steam valved is
closed. Therefore if the engine races, the steam is shut down, and if
the engine begins to slow or stall, the steam is increased. This feedback happens
continuously without human supervision, and the net result is that the steam
engine runs indefinitely, with good stability, at a near-constant speed (as long
as the fuel is supplied and their is no major breakage).
It is not feasible to construct a working quantum computer of useful size
based on passive stability alone. There is another type of stability, however,
called active stability. This is widely used in human-made machines
and in living organisms. In fact active stabilisation (also called servo-control)
is so widespread that almost all machines which have to operate without constant
human supervision rely on it. The most well-known early example is the governor or
steam governor introduced by James Watt to stabilise steam engines. (See figure)
The output of the steam engine is geared to a vertical shaft (a), attached to which
are two rods (c) with heavy balls (B) at the end. The rods can pivot about their
attaching point (b). When the shaft rotates, the balls
swing outwards, and cause a collar (e,f) to move upwards. This collar is attached
by a series of pivoting rods (g,i) to the steam valve, controlling
entry of steam to the engine. These pivots are oriented such that when the collar rises the steam valved is
closed. Therefore if the engine races, the steam is shut down, and if
the engine begins to slow or stall, the steam is increased. This feedback happens
continuously without human supervision, and the net result is that the steam
engine runs indefinitely, with good stability, at a near-constant speed (as long
as the fuel is supplied and their is no major breakage).
Whenever we perform the simplest task, such as picking up an object, this kind of feedback is going on all the time, via our senses, brains, and muscles, to ensure correct completion of the task.

 A closely related design concept, which can be viewed as an example of active stabilisation,
is contained in even simpler mechanical objects such as a switch or
a latch on a gate. A latch on a gate is designed to stay fixed in the down
position when we wish the gate to remain closed, but in such a way that without
too much difficulty we can nevertheless raise the latch in order to open the gate.
A switch is designed to stay in one of two (or more) locations for indefinite
periods, but in such a way that we can change the setting when we want to
by pushing on a lever (or button).
A closely related design concept, which can be viewed as an example of active stabilisation,
is contained in even simpler mechanical objects such as a switch or
a latch on a gate. A latch on a gate is designed to stay fixed in the down
position when we wish the gate to remain closed, but in such a way that without
too much difficulty we can nevertheless raise the latch in order to open the gate.
A switch is designed to stay in one of two (or more) locations for indefinite
periods, but in such a way that we can change the setting when we want to
by pushing on a lever (or button).
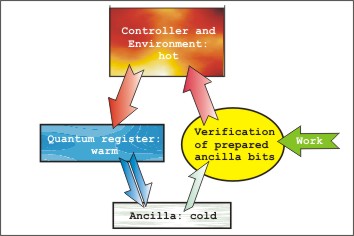
In all these examples (governor, latch, switch) there are three fundamental ingredients: a form of detection (including amplification), a route for feedback, and last but not least, friction (or more generally, energy dissipation). The detection is needed in order to detect departures from the desired state of the device (e.g. a given speed, a given location), and the feedback is needed to restore the state. In the case of the latch on a garden gate, detection and feedback are provided by the force of gravity, in the switch they are provided by a spring. The final ingredient, friction, is also crucial, because without it the system will oscillate: the steam engine would continually swing between too fast and too slow, the latch would bounce, and the switch would never settle.
Inside a computer---the ordinary kind, not relying on quantum physics in its information handling---active stabilisation of the kind occuring in switches is built in at a fundamental level. This is crucial to the stability and thus correct functioning of the computer. The result is that computer chips have to dissipate a lot of heat, and one of the fundamental design problems of computer architecture is the handling and extraction of this heat.
Of course all these facts are very familiar to control engineers, but it is worth considering them in order to present clearly to our minds the central fact that
- active stabilisation depends on measurement and dissipation.
This leads us to ask, is active stabilisation available for quantum computers? On the face of it, the answer must be "no", because of two unavoidable facts:
- a quantum system cannot be measured without disturbing it in a fundamentally uncontrolled way
- quantum computation relies on non-dissipative evolution
This is why quantum computation appeared to be a practical impossibility when it was first discussed.